
今天完成了遥控车的改造,这是自主控制的第一步。这辆车是在淘宝上买的,结构很简单,控制很简陋。方向就是将电机打死,这时候电流会非常大,而且对于将来的自主移动的精细控制带来不利因素。所以很早就想把它改成舵机控制的了,下面就是整个改造的过程。
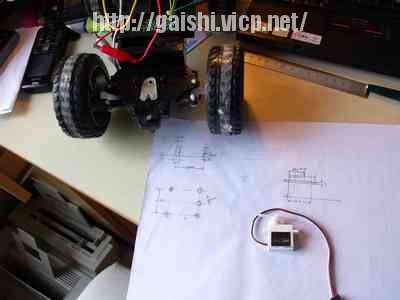
这就是需要改造的部分。

先将需要改造的部分画下来,便于设计框架结构。我不是机械出身的,所以就画个大概吧。
结构图完成
在图纸上设计新的结构

根据设计切割材料
最后完成的样子,由于是临时电路,也就没固定,看上去有点像垃圾车-_-b

改造部分的特写

再来一张

这些只是机械部份,然后就是控制部份。由于舵机能够转动的角度范围到180度,而该车的转向轮仅能转动在30-40度之间。同时,自主移动机器人目标是在Arduino上面开发。所以我就一步到位,先用Arduino读取天地飞的pwm信号,然后经过转换,输出新的pwm信号给舵机,这样就不会因为卡住而损坏舵机了。
最后效果如下
http://v.youku.com/v_show/id_XMjYzOTc2NzA4.html
使用的程序非常简单,如下:
#include <Servo.h>
//Author: HE Qichen
//Date: 2011-5-3
//Website: http://heqichen.cn
//Email: heqichen(a)gmail.com
Servo directionServo;
void setup()
{
pinMode(2, INPUT);
directionServo.attach(3);
}
void loop()
{
int t, a;
t = pulseIn(2, HIGH);
a = map(t, 1000, 2000, 65, 115);
directionServo.write(a);
}
1,976 total views, 1 views today
