
今天拿到了四轴飞行器的一个重要部件,就是陀螺仪。^_^ 下面这张图上的就是了,这是一个三轴陀螺仪,seeedstudio GROVE套装的一个部件。

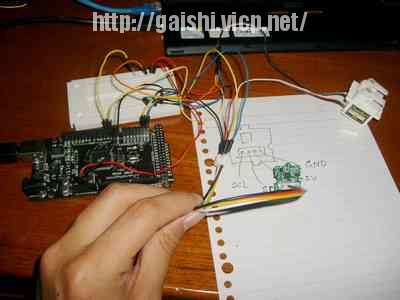
这个陀螺仪使用ITG3200芯片,可以直接使用了I2C接口连接到Arduino上面。默认的地址是0x68,但是可以修改成0x69,只要将板子上的JP1连起来就可以修改。接口四个针脚的定义就像下面这张图中所画的。

是的。。你没看错,他们用红色作为地线 -_-b
舵机就是最简单的使用pwm的口就可以了。最后链接成下面这张图中的样子。
我写了一个程序,代码在下方,能够做到让陀螺仪的转动直接反应在舵机的摇臂上面。但是,这样也会遇到问题,就是当动的次数比较多的时候,舵机的角度就会越来越大,直到超过最大的范围,所以这也是陀螺仪不是很精确的地方。另外就是,在陀螺仪静止的情况下,z轴的输出不为0,始终为-1。也就是说,这个陀螺仪的零点可能是不准确的,同时,正负转动的也有可能有差别,不知道这回对将来飞控算法带来多大的影响。
最后用到的程序就是下面这段。
#include <Wire.h>
#include <Servo.h>
#define GYRO_ADDR 0x68
Servo servo;
int currentPos;
void setup()
{
Wire.begin();
initGyro();
servo.attach(2);
currentPos = 90;
//Serial.begin(9600);
pinMode(3, INPUT);
}
void loop()
{
int x;
int v;
x = readx();
v = ready();
v = readz();
currentPos = currentPos + x;
int buttonState;
buttonState = digitalRead(3);
if (buttonState == HIGH)
{
currentPos = 90;
}
else
{
//Serial.println("LOW");
}
servo.write(currentPos);
}
int readx()
{
int x;
x = readGyro(0x1d, 0x1e);
return x;
}
int ready()
{
int y;
y = readGyro(0x1f, 0x20);
return y;
}
int readz()
{
int z;
z = readGyro(0x21, 0x22);
return z;
}
char readGyro(unsigned char addrH, unsigned char addrL)
{
char ret;
Wire.beginTransmission(GYRO_ADDR);
Wire.send(addrH);
Wire.endTransmission();
Wire.requestFrom(GYRO_ADDR, 1);
if (Wire.available() > 0)
{
ret = Wire.receive();
}
Wire.beginTransmission(GYRO_ADDR);
Wire.send(addrL);
Wire.endTransmission();
Wire.requestFrom(GYRO_ADDR, 1);
if (Wire.available() > 0)
{
ret != Wire.receive()<<8;
}
return ret;
}
void initGyro()
{
Wire.beginTransmission(GYRO_ADDR);
Wire.send(0x3E);
Wire.send(0x80); //send a reset to the device
Wire.endTransmission(); //end transmission
Wire.beginTransmission(GYRO_ADDR);
Wire.send(0x15);
Wire.send(0x00); //sample rate divider
Wire.endTransmission(); //end transmission
Wire.beginTransmission(GYRO_ADDR);
Wire.send(0x16);
Wire.send(0x18); // ±2000 degrees/s (default value)
Wire.endTransmission(); //end transmission
}
程序当中Wire库就是使用I2C,具体文档可以看下面的链接。
http://arduino.cc/en/Reference/Wire
http://v.youku.com/v_show/id_XMjYzMTg2ODQ0.html
1,967 total views, 1 views today
